Autonomous Line Sensing Buggy
An autonomous line sensing buggy built to compete against other teams to evaluate which team had the best mechanical design, electrical design, firmware, and control system. A test of the team's skills at designing and building an embedded system.
Buggy Overview
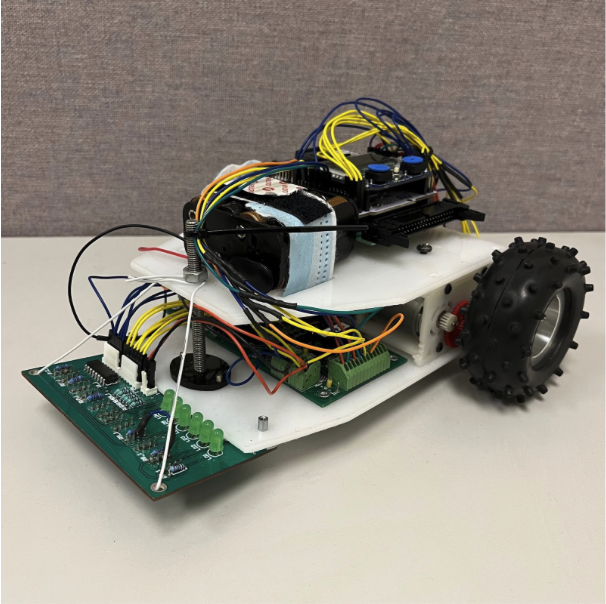
Figure 1: The Buggy
Interactive 3D Model (Coming Soon!)
Project Description
TODO
Images

Figure 1: TODO.

Figure 2: TODO.
Project Specific Skills
- Project Management: Hardware team lead
- Motor and gearbox characterisation
- PCB validation and testing
- Control system design and tuning (PID)
- Microcontroller programming (STM32F401RE)
- Sensor integration (Quatrature encoder, BLE)
- IR sensor selection
- Report Writing